Step by step & back...oder:
Der langsamste Fortschritt der Weltgeschichte!
Schrittmotor, Typ: "Fortschritt" – Raspberry Pi
ZUTATEN
WERKZEUGE
- Schere
- Papier
- Stanley-Messer
- Doppelseitiges Klebeband
- Zahnstocher
ANLEITUNG
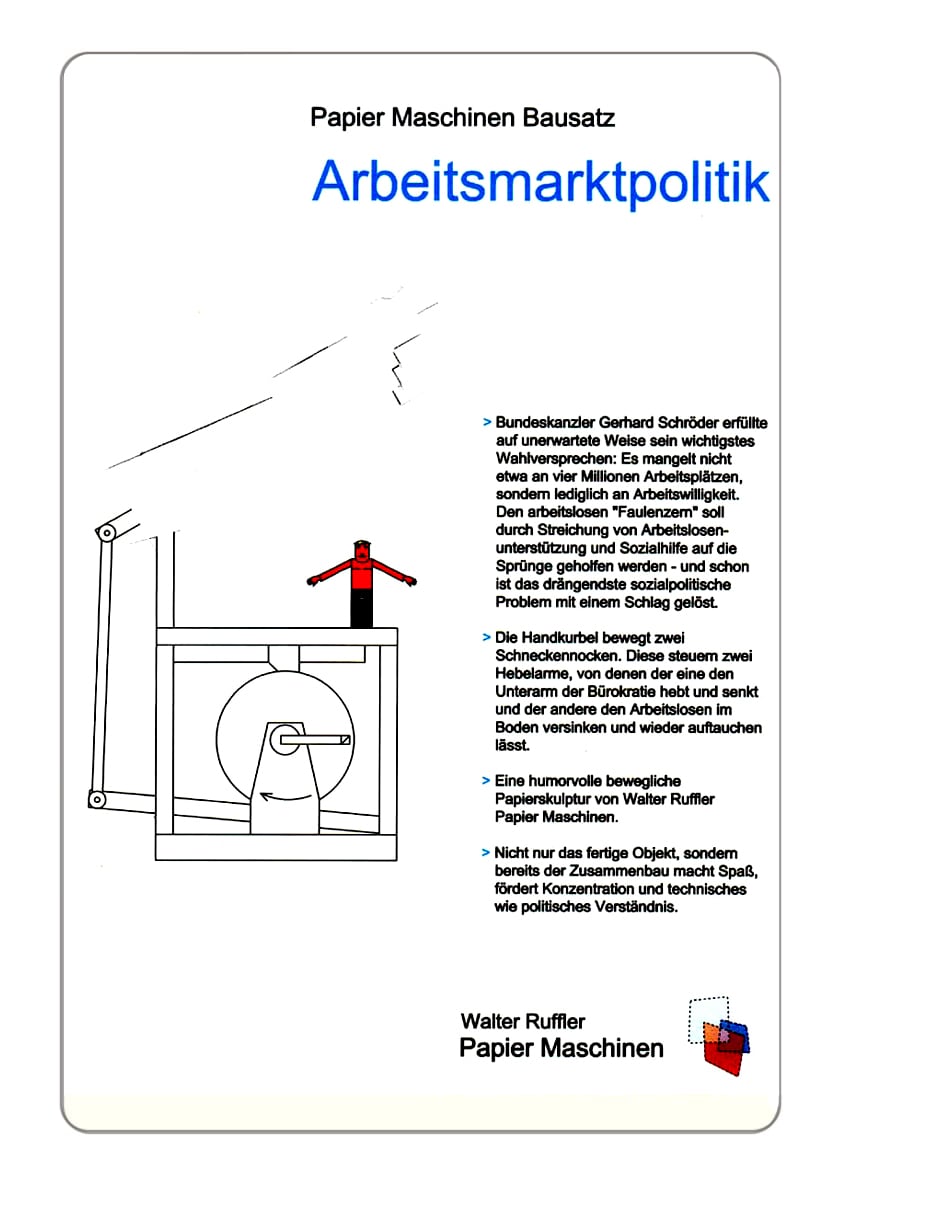
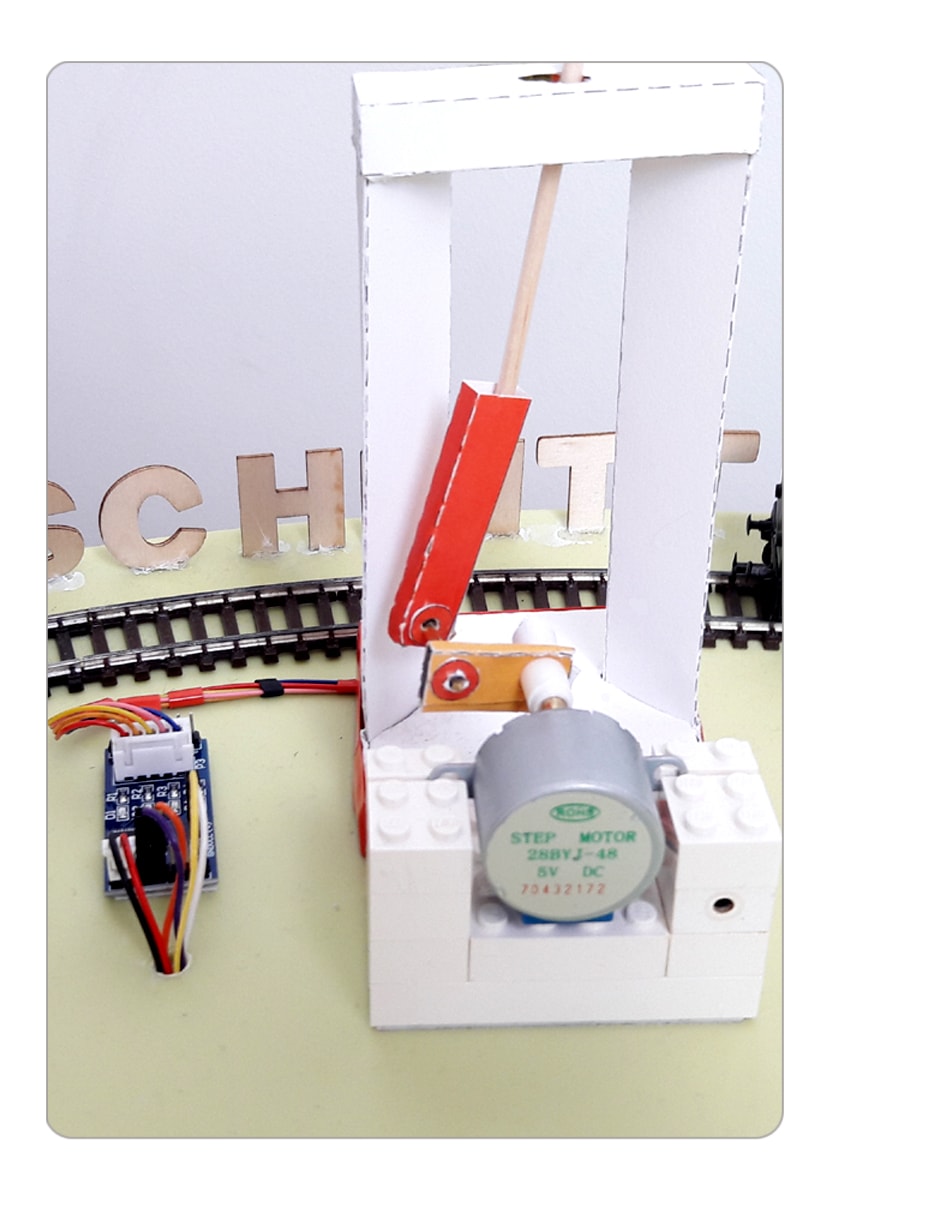
Die aus weißen LGO-Steinen und Papier bestehende Konstruktion mit integriertem Schrittmotor
wurde durch eine Maschine von Walter Ruffler aus Bremen inspiriert, die "Arbeitsmarktpolitik" heißt. Ohne
Agenda 2010 wäre diese humorvolle Papierkonstruktion wohl undenkbar gewesen – die dazugehörige Hand aus Papier, befestigt an einem Zahnstocher, wurde entwendet und Teil der Maschine Schrittmotor, Typ: "Fortschritt",
die wiederum auf der Maschine "Geradschub-Kurbelgetriebe", ebenfalls von Walter Ruffler, basiert.
- Maschine Arbeitsmarktpolitik (oder: Hartz IV) © Walter Ruffler
- Maschine Kurbelgetriebe © Walter Ruffler
Datenblatt Schrittmotor
Voraussetzung für die Steuerung des Schrittmotors ist die Verbindung mit einer Motorsteuerungsplatine – in diesem Fall ist es die ULN2003A.
Die fünf in einem einzigen Stecker eingefassten Kabel des Schrittmotors werden in die Buchse der Platine gesteckt, die Eingänge IN1 – IN4
sowie die Eingänge für 5V und GND auf der diametral entgegengesetzten Seite der Platine wie folgt mit den Pins am Raspberry Pi verbunden:
Verbindungen ULN2003A –
Raspberry Pi
- Maschine Arbeitsmarktpolitik (oder: Hartz IV) © Walter Ruffler
- Maschine Kurbelgetriebe © Walter Ruffler
| Verbindungen ULN2003A – | Raspberry Pi |
– (hier: weiß) an GND
+ (hier: gelb) an 5V
IN1 (schwarz) an PIN 7 (=GPIO4)
IN2 (rot) an PIN 11 (=GPIO17)
IN3 (lila) an PIN 13 (=GPIO27)
IN4 (orange) an PIN 15 (=GPIO22)
CODE
Hier findest Du den Code zur Schrittmotorsteuerung am Raspberry Pi, jenen für Arduino findest Du hier
# +++ servo-motorsteuerungscode für raspberry pi +++
import RPi.GPIO as GPIO
import time
# GPIO.BOARD ist ident mit der physikalischen
# Nummerierung am Raspberry Pi
GPIO.setmode(GPIO.BOARD)
ControlPin= [7,11,13,15]
for pin in ControlPin:
GPIO.setup(pin,GPIO.OUT)
GPIO.output(pin,0)
seq = [ [1,0,0,0],
[1,1,0,0],
[0,1,0,0],
[0,1,1,0],
[0,0,1,0],
[0,0,1,1],
[0,0,0,1],
[1,0,0,1] ]
for i in range(51200):
for halfstep in range(8):
for pin in range(4):
GPIO.output(ControlPin[pin], seq[halfstep] [pin])
time.sleep(0.001)
GPIO.cleanup()
Happy Coding!
Die Papiermaschinist_innen ;-)
Die Papiermaschinist_innen ;-)