Rechnest auch Du (noch) mit dem Sozialismus?
Dann bau' Dir eine Spielmaschine im Geiste Konrad Zuses! *
Arbeit mit Studierenden der Ufg Linz (SS 2018)
Studienrichtung Mediengestaltung (Lehramt)
Dank für die Produktion des Videos geht an © Bertram Verdezoto Galeas, Kontakt: bertram.verdezoto-galeas@ufg.at
Rückblick auf ein Experiment aus dem Medienlabor::
City Lights, oder: Wie man Verbindungen herstellt und verändert
THX to Special Guest Florian "overflo" Bittner@Hackershop – Blinkenrocket 4ever!
Empfehlung für Interessierte:: Linux-Kurs für AnfängerInnen@Mond – Grüße von Sonne!

ZUTATEN
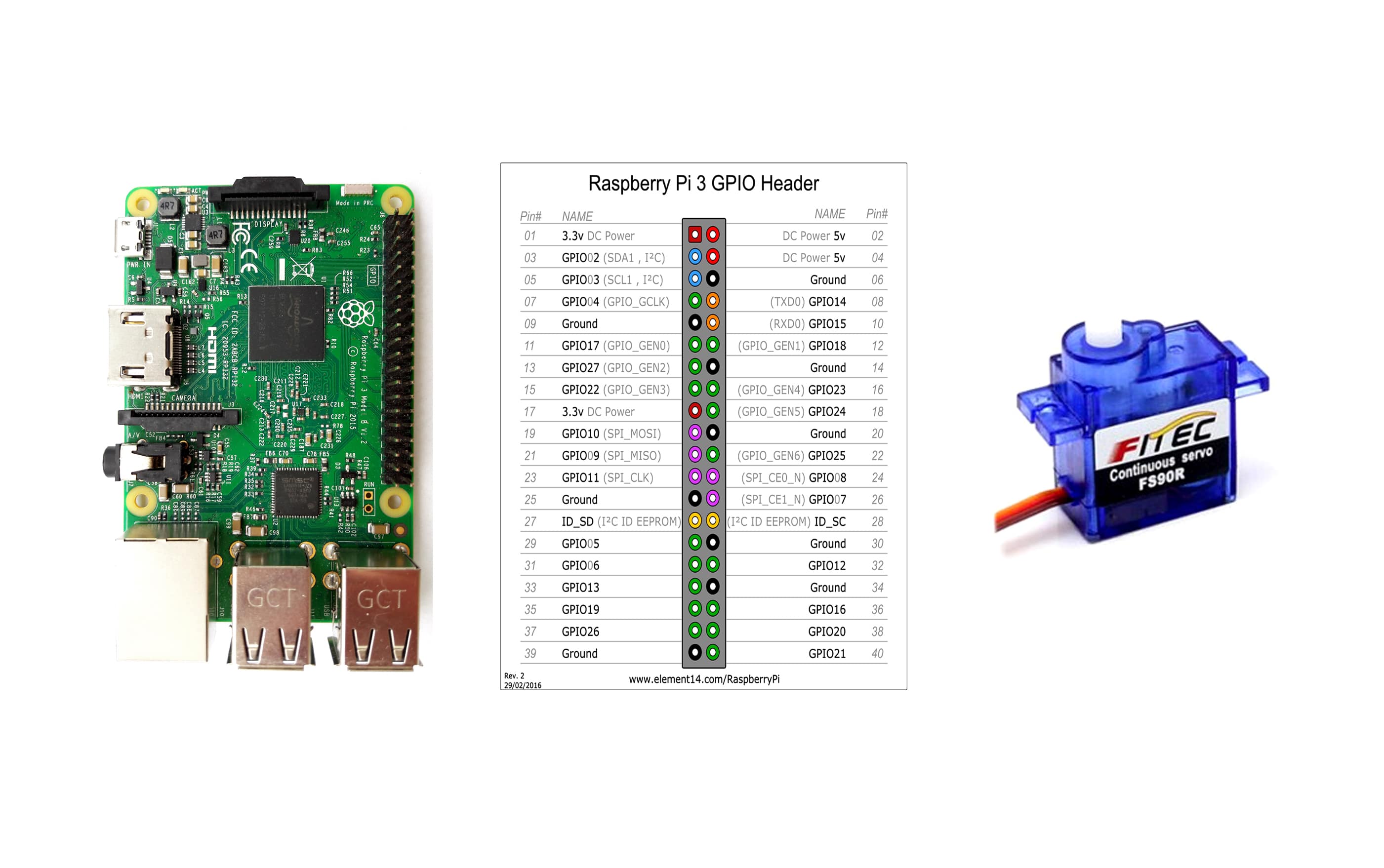
- Raspberry Pi 3 Modell B, möglich sind auch höhere Versionen (3 ++)
- 360° Continuous Rotation Servo – FeeTech FS5103R
WERKZEUGE
- Stecknadeln
- Superkleber
ANLEITUNG & PROJEKT
Vieles, was Du über die Steuerung von Servo-Motoren mit dem Raspberry Pi wissen musst, findest Du hier
ANMERKUNGEN
Hier findest Du eine Dokumentation zur Inbetriebnahme des LINUX-Microcomputers Raspberry Pi [work in progress]
CODE
Der Code zur Steuerung des Server-Motortyps 360° Continuous Rotation Servo – FeeTech FS5103R wurde in der Programmiersprache python geschrieben und wird Dir hiermit zur Verfügung gestellt!
# +++ barbara's code zur 360º servo-motorsteuerung +++
import time
# GPIO-Library für Raspberry PI
import RPi.GPIO as GPIO
# Aktivierung der Pin-Modes am Raspberry Pi
GPIO.setmode(GPIO.BCM)
# Pin 18 am Raspberry PI wird als Output-Pin gesetzt
GPIO.setup(18, GPIO.OUT)
# PWM-Frequenz (= Pulsweitenmodulation) wird für Pin 18
# mit 100 Hertz bestimmt
pwm=GPIO.PWM(18,100)
# Der Standard-Wert für den Servo-Motor FeeTech FS5103R
# liegt zwischen 50 - 100 Hertz
# Mit 5 Hertz wird die Startposition des Motors
# mit 45º bestimmt
pwm.start(5)
# Festlegung des Drehwinkels auf 200º
angle=200
# Angle To Duty-Cycle-Conversion, Festlegung in º
duty=float(angle)/10 + 2.5
# Initialer Wert der Integer-Variable
int=0
# while-Schleife (enthält Bedingung,
# die nicht falsch werden kann -> Endlosschleife)
while int<=0:
# Bedingung zur Änderung des Duty-Cycles
pwm.ChangeDutyCycle(duty)
# Pause für 800 Millisekunden
time.sleep(0.8)
# Funktion zum Entfernen
# von Resten anliegender elektronischer Spannung
GPIO.cleanup()
Eine allgemeine Einführung zum Steuern von Sensoren und Aktoren wird hier von O'Reilly zur Verfügung gestellt, der .ino-Code für die Servomotor-Steuerung mit einem Arduino findet sich hier:
// +++ barbara's servo-motorsteuerungscode für arduino ++
// Die Bibliothek Servo.h wird eingebunden mit
#include Servo.h
// Servo-Object "myservo" wird erstellt
Servo myservo;
// Funktionsdeklaration
// PWM-Pin wird mit Pin 9 belegt
void setup()
{
myservo.attach(9);
}
// Funktionsaufruf
void loop()
{
myservo.write(179); // Servo wird um je 179 Grad gedreht
// mögliche Werte [0 - 179; 1023]
// 0 ; 1023 (CW)
// 179 (CCW)
delay(15); // Verzögerung um 15 Sekunden
}
Happy Coding!
Die Spielmaschinenmenschen ;-)
Rückblick auf ein Experiment aus dem Medienlabor::
City Lights, oder: Wie man Verbindungen herstellt und verändert
THX to Special Guest Florian "overflo" Bittner@Hackershop – Blinkenrocket 4ever! Empfehlung für Interessierte:: Linux-Kurs für AnfängerInnen@Mond – Grüße von Sonne!
- Raspberry Pi 3 Modell B, möglich sind auch höhere Versionen (3 ++)
- 360° Continuous Rotation Servo – FeeTech FS5103R
- Stecknadeln
- Superkleber
# +++ barbara's code zur 360º servo-motorsteuerung +++
import time
# GPIO-Library für Raspberry PI
import RPi.GPIO as GPIO
# Aktivierung der Pin-Modes am Raspberry Pi
GPIO.setmode(GPIO.BCM)
# Pin 18 am Raspberry PI wird als Output-Pin gesetzt
GPIO.setup(18, GPIO.OUT)
# PWM-Frequenz (= Pulsweitenmodulation) wird für Pin 18
# mit 100 Hertz bestimmt
pwm=GPIO.PWM(18,100)
# Der Standard-Wert für den Servo-Motor FeeTech FS5103R
# liegt zwischen 50 - 100 Hertz
# Mit 5 Hertz wird die Startposition des Motors
# mit 45º bestimmt
pwm.start(5)
# Festlegung des Drehwinkels auf 200º
angle=200
# Angle To Duty-Cycle-Conversion, Festlegung in º
duty=float(angle)/10 + 2.5
# Initialer Wert der Integer-Variable
int=0
# while-Schleife (enthält Bedingung,
# die nicht falsch werden kann -> Endlosschleife)
while int<=0:
# Bedingung zur Änderung des Duty-Cycles
pwm.ChangeDutyCycle(duty)
# Pause für 800 Millisekunden
time.sleep(0.8)
# Funktion zum Entfernen
# von Resten anliegender elektronischer Spannung
GPIO.cleanup()
// +++ barbara's servo-motorsteuerungscode für arduino ++
// Die Bibliothek Servo.h wird eingebunden mit
#include Servo.h
// Servo-Object "myservo" wird erstellt
Servo myservo;
// Funktionsdeklaration
// PWM-Pin wird mit Pin 9 belegt
void setup()
{
myservo.attach(9);
}
// Funktionsaufruf
void loop()
{
myservo.write(179); // Servo wird um je 179 Grad gedreht
// mögliche Werte [0 - 179; 1023]
// 0 ; 1023 (CW)
// 179 (CCW)
delay(15); // Verzögerung um 15 Sekunden
}
Die Spielmaschinenmenschen ;-)
* Konrad Zuse :: * 1910, Berlin [als Maler: Kuno See] – "Vater des Computers" Z3 (* 1941) && überzeugter Vertreter des Computer-Sozialismus